ABB机器人与西门子s7-1200Profinet通讯实现步骤
2025-04-01
前言
在工业自动化领域,ABB机器人和西门子S7-1200 PLC的结合为智能制造注入了新的活力。它们之间通过PN(Profinet)通信实现数据的高效交换。本篇文章将详细解析ABB机器人与西门子1200 PLC的PN通信案例,帮助你更好地理解其应用和实现步骤。
应用案列
我们设想一个具体的应用场景:在一条自动化生产线上,ABB机器人负责物料的搬运,而西门子S7-1200 PLC则负责整体生产过程的控制与监测。通过PN通信,PLC能够下发指令给机器人,机器人在接收到指令后执行相应的动作。
一、硬件准备
ABB机器人:搭载相应的控制器,支持PN通信模块。
西门子S7-1200 PLC:配备适当的Profinet接口。
网线以及工业以太网交换机:用于连接机器人与PLC。
计算机:用于配置与编程。
二、机器人设置
1、通讯设置
(1)用网线将ABB机器人控制柜LAN3口和西门子1200进行连接
(2)用电脑RobotStudio连接机器人,设置通讯网络
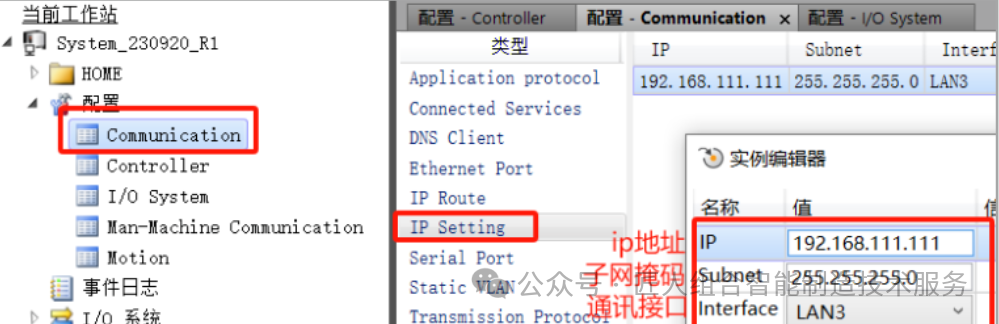
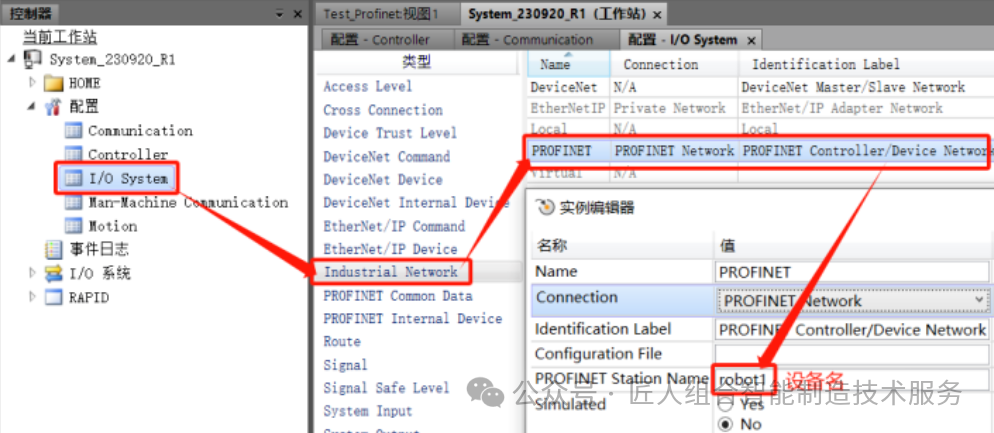
(3)设置通讯名称
(4)设置通讯字节数
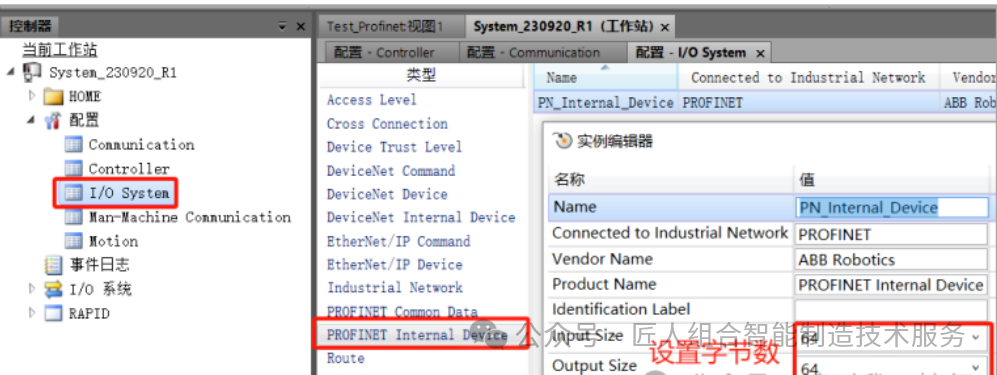
(5)分配PN网络上的IO信号(ABB机器人输出=Plc输入,Plc输出=ABB机器人输入)
在创建IO信号时,通讯设备选择Profinet
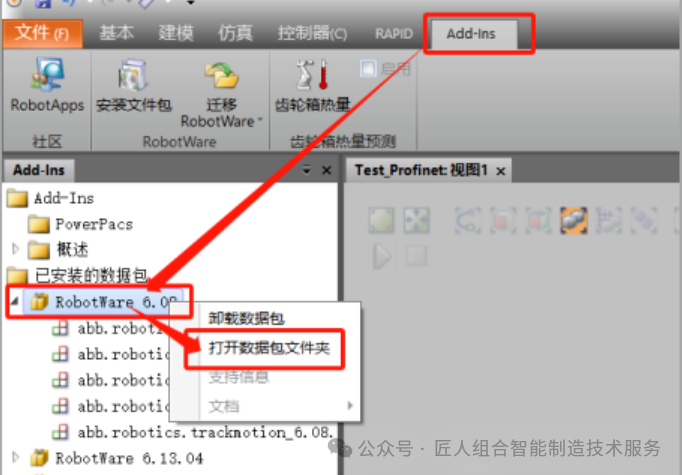
2、获取GSD文件
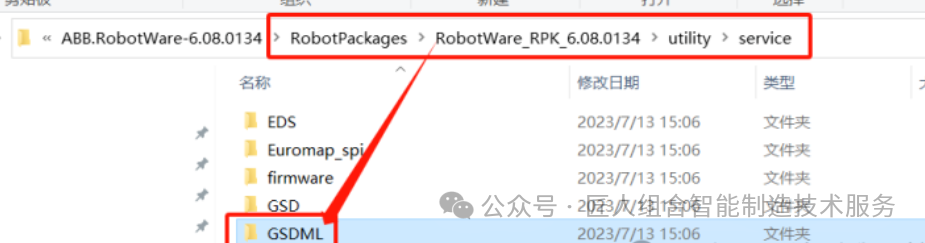
(1)找到与示教器相同版本的Robotware,打开数据包文件夹
(2)找到对应的文件复制粘贴至自己的文档
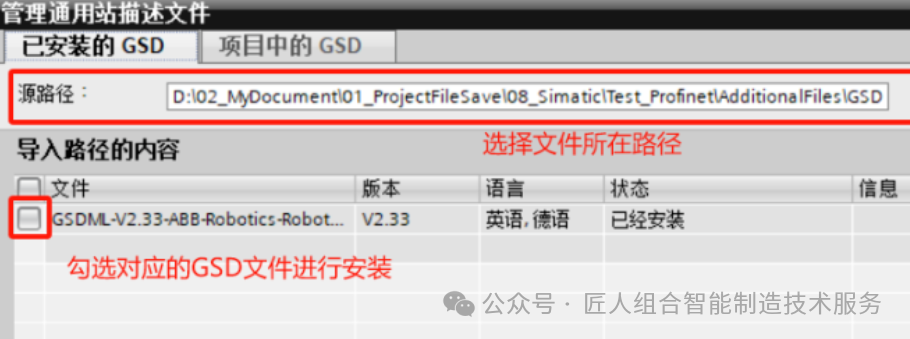
三、PLC设置
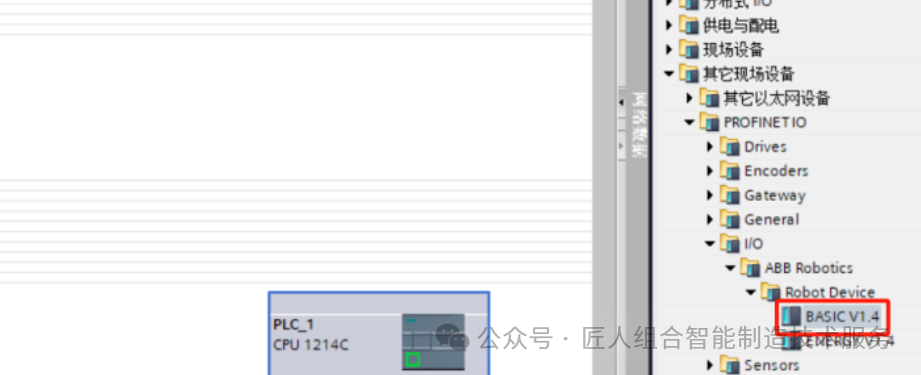
(1)打开或者创建工程文件,点击【选项】-【管理通用站描述文件】,安装GSD文件
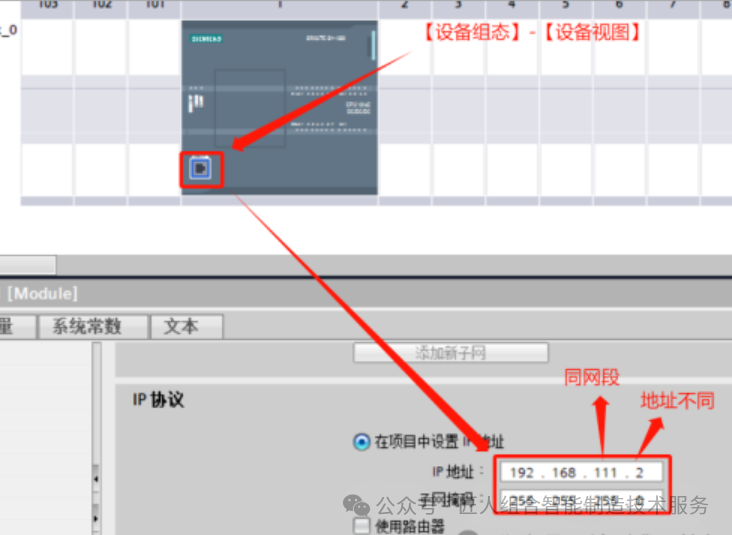
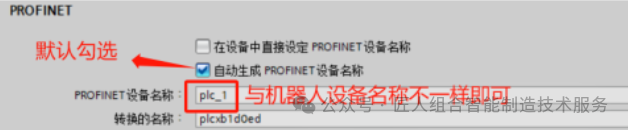
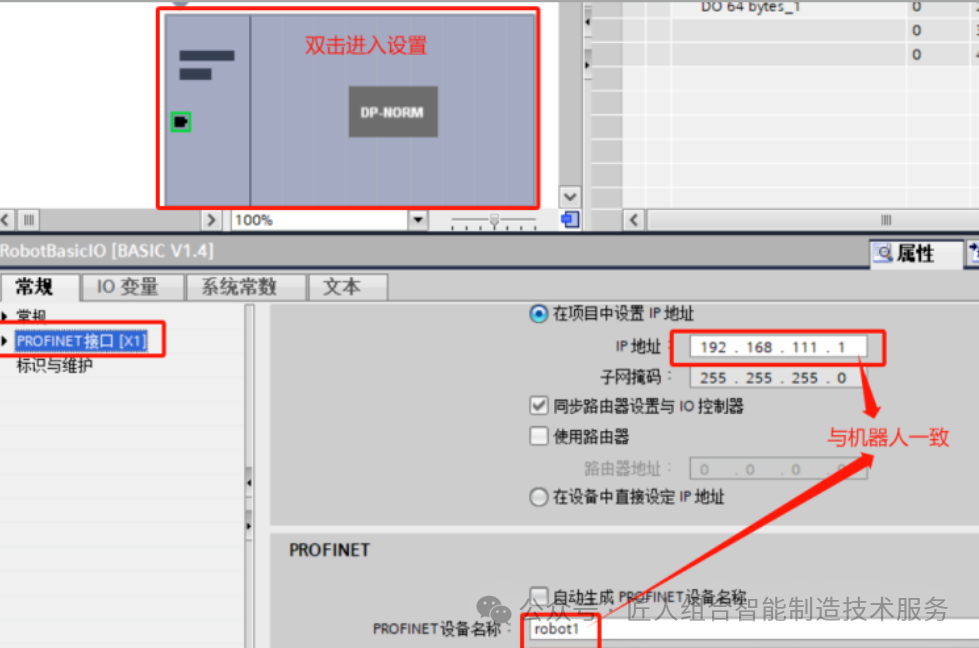
(2)设置PLC Profinet通讯地址的IP地址,设备名称
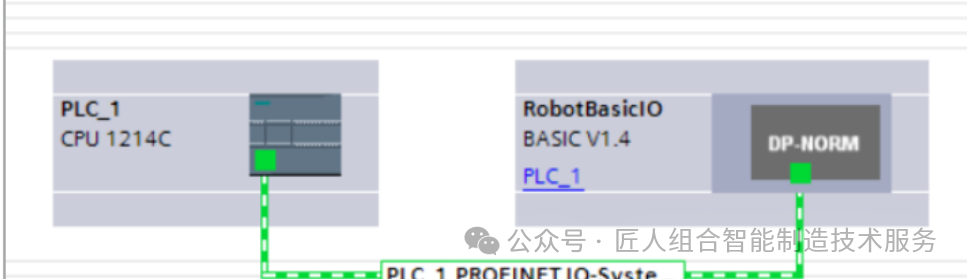
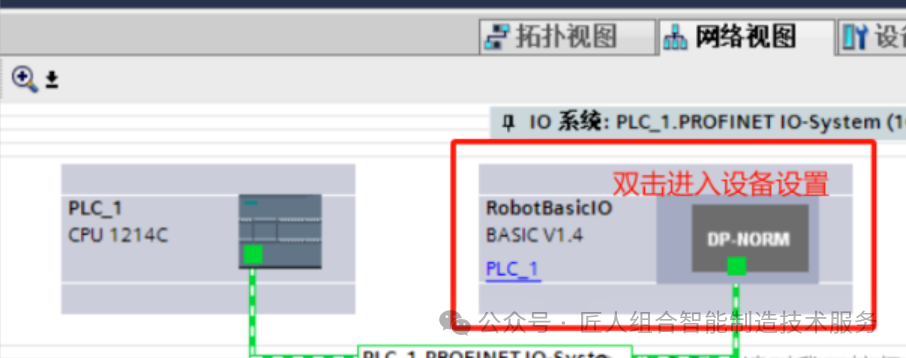
(3)将硬件拖入网络视图中并连接
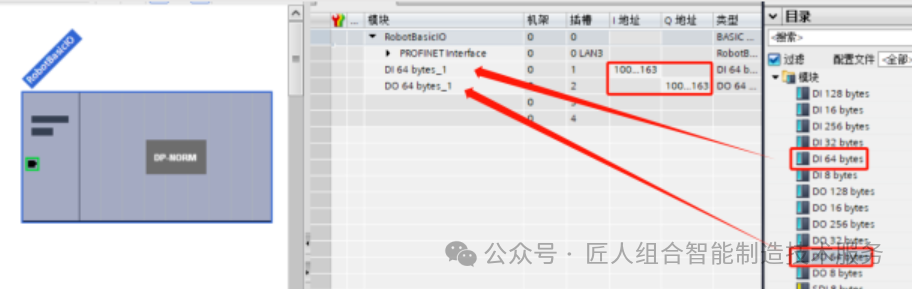
(4)添加DI和DO模块,并设置地址
(5)设置通讯对象的IP地址和名称,即可完成通讯设置
一旦程序编写完成,进行以下测试确认系统的正常运行:
2、运行PLC程序,观察ABB机器人是否能依据PLC发送的目标位置进行移动。
3、若无法正常工作,检查网络连线、IP配置及数据块设置。